Sensotronic Brake Control (SBC™) works electronically, and thus faster and more precisely, than a conventional hydraulic braking system. As soon as you press the brake pedal and the sensors identify the driving situation in hand, the computer makes an exact calculation of the brake force necessary and distributes it between the wheels as required. This allows SBC™ to critically reduce stopping distances. SBC™ also helps to optimise safety functions such as ESP®, ASR, ABS and BAS.
With Sensotronic Brake Control, electric impulses are used to pass the driver's braking commands onto a microcomputer which processes various sensor signals simultaneously and, depending on the particular driving situation, calculates the optimum brake pressure for each wheel. As a result, SBC offers even greater active safety than conventional brake systems when braking in a corner or on a slippery surface. A high-pressure reservoir and electronically controllable valves ensure that maximum brake pressure is available much sooner. Moreover, the system offers innovative additional functions to reduce the driver's workload. These include Traffic Jam Assist, which brakes the vehicle automatically in stop-and-go traffic once the driver takes his or her foot off the accelerator. The Soft-Stop function - another first - allows particularly soft and smooth stopping in town traffic
INTRODUCTION
When drivers hit the brake pedal today, their foot moves a piston rod which is linked to the brake booster and the master brake cylinder. Depending on the pedal force, the master brake cylinder builds up the appropriate amount of pressure in the brake lines which - in a tried and tested interaction of mechanics and hydraulics - then presses the brake pads against the brake discs via the wheel cylinders.
By contrast, in the Mercedes-Benz Sensotronic Brake Control, a large number of mechanical components are simply replaced by electronics. The brake booster will not be needed in future either. Instead sensors gauge the pressure inside the master brake cylinder as well as the speed with which the brake pedal is operated, and pass these data to the SBC computer in the form of electric impulses. To provide the driver with the familiar brake feel, engineers have developed a special simulator which is linked to the tandem master cylinder and which moves the pedal using spring force and hydraulics. In other words: during braking, the actuation unit is completely disconnected from the rest of the system and serves the sole purpose of recording any given brake command. Only in the event of a major fault or power failure does SBC automatically use the services of the tandem master cylinder and instantly establishes a direct hydraulic link between the brake pedal and the front wheel brakes in order to decelerate the car safely.
The central control unit under the bonnet is the centrepiece of the electrohydraulic brake. This is where the interdisciplinary interaction of mechanics and electronics provides its greatest benefits - the microcomputer, software, sensors, valves and electric pump work together and allow totally novel, highly dynamic brake management:
In addition to the data relating to the brake pedal actuation, the SBC computer also receives the sensor signals from the other electronic assistance systems. For example, the anti-lock braking system (ABS) provides information about wheel speed, while Electronic Stability Program (ESP®) makes available the data from its steering angle, turning rate and transverse acceleration sensors. The transmission control unit finally uses the data highway to communicate the current driving range. The result of these highly complex calculations is rapid brake commands which ensure optimum deceleration and driving stability as appropriate to the particular driving scenario. What makes the system even more sophisticated is the fact that SBC calculates the brake force separately for each wheel.
SENSOTRONIC BRAKE CONTROL - THE BRAKES OF THE FUTURE
Sensotronic Brake Control (SBC) is the name given to an innovative electronically controlled brake system which Mercedes-Benz will fit to future passenger car models. Following on from the Mercedes innovations ABS, ASR, ESP® and Brake Assist, this system is regarded as yet another important milestone to enhance driving safety. With Sensotronic Brake Control electric impulses are used to pass the driver’s braking commands onto a microcomputer which processes various sensor signals simultaneously and, depending on the particular driving situation, calculates the optimum brake pressure for each wheel. As a result, SBC offers even greater active safety than conventional brake systems when braking in a corner or on a slippery surface. A high-pressure reservoir and electronically controllable valves ensure that maximum brake pressure is available much sooner. Moreover, the system offers innovative additional functions to reduce the driver’s workload. These include Traffic Jam Assist, which brakes the vehicle automatically in stop-and-go traffic once the driver takes his or her foot off the accelerator. The Soft-Stop function – another first – allows particularly soft and smooth stopping in town traffic.
Mechatronics – a new term is gaining popularity within the automotive industry and is rapidly developing into the catchword of a quiet technological revolution which in many fields stands century-old principles on their head. Mechatronics brings together two disciplines which in many cases were thought to be irreconcilable, namely mechanics and electronics.
Hence automobile functions which hitherto worked purely mechanically and partly with hydraulic assistance will in future be controlled by high-performance microcomputers and electronically controllable actuators. These either replace the conventional mechanical components or else enhance their function. The mechatronic interplay therefore opens up hitherto inconceivable possibilities to further raise the safety and comfort levels of modern passenger cars. For example: it was only thanks to mechatronics that an electronically controlled suspension system which instantly adapts to prevailing conditions when driving off, braking or cornering -- thus providing a totally new driving experience -- became a reality. In 1999 Mercedes-Benz launched this system under the name Active Body Control (ABC) in the flagship CL coupé, thereby signalling the advent of a new era of suspension technology.
This electronically controlled suspension system will quickly be followed by the electronic brake system: Mercedes-Benz and Bosch have teamed up on this benchmark development project which will shortly enter into series production at the Stuttgart automobile brand under the name Sensotronic Brake Control -- or SBC for short.
It turns the conventional hydraulic brake into an even more powerful mechatronic system. Its microcomputer is integrated into the car’s data network and processes information from various electronic control units. In this way, electric impulses and sensor signals can be instantly converted into braking commands, providing a marked safety and comfort gain for drivers.

Brake pedal: electronics instead of a vacuum
To turn to the technical side: when drivers hit the brake pedal today, their foot moves a piston rod which is linked to the brake booster and the master brake cylinder. Depending on the pedal force, the master brake cylinder builds up the appropriate amount of pressure in the brake lines which – in a tried and tested interaction of mechanics and hydraulics - then presses the brake pads against the brake discs via the wheel cylinder.
In the Mercedes-Benz Sensotronic Brake Control, by contrast, a large number of mechanical components are simply replaced by electronics. The brake booster will not be needed in future either. Instead sensors gauge the pressure inside the master brake cylinder as well as the speed with which the brake pedal is operated, and pass these data to the SBC computer in the form of electric impulses.
To provide the driver with the familiar brake feel engineers have developed a special simulator which is linked to the tandem master cylinder and which moves the pedal using spring force and hydraulics. In other words: during braking the actuation unit is completely disconnected from the rest of the system and serves the sole purpose of recording any given brake command. Only in the event of a major fault or power failure inside the 12V vehicle battery does SBC automatically use the services of the tandem master cylinder and instantly establishes a direct hydraulic link between the brake pedal and the front wheel brakes in order to decelerate the car safely.
Control unit: pressure modulators for each wheel
The central control unit under the bonnet is the centrepiece of the electrohydraulic brake. This is where the interdisciplinary interaction of mechanics and electronics provides its greatest benefits – the microcomputer, software, sensors, valves and electric pump work together and allow totally novel, highly dynamic brake management:
In addition to the data relating to the brake pedal actuation, the SBC computer also receives the sensor signals from the other electronic assistance systems. For example, the anti-lock braking system (ABS) provides information about wheel speed, while ESP® makes available the data from its steering angle, turning rate and transverse acceleration sensors. The transmission control unit finally uses the data highway to communicate the current driving range. The result of these highly complex calculations is rapid brake commands which ensure optimum deceleration and driving stability as appropriate to the particular driving scenario. What makes the system even more sophisticated is the fact that SBC calculates the brake force separately for each wheel.
The high-pressure reservoir contains the brake fluid which enters the system at a pressure of between 140 and 160 bar. The SBC computer regulates this pressure and also controls the electric pump which is connected to the reservoir. This ensures much shorter response times than on conventional brake systems. Yet another advantage: full braking power is available even when the engine is switched off. The hydraulic unit mainly comprises four so-called wheel pressure modulators. They mete out the brake pressure as required and pass it onto the brakes. In this way it is possible to meet the microcomputer’s stipulations while each wheel is slowed down separately in the interests of driving stability and optimum deceleration. These processes are monitored by pressure sensors inside the wheel pressure modulators.
Emergency braking: stopping distance reduced by up to three per cent
The main performance characteristics of Sensotronic Brake Control include the extremely high dynamics during pressure build-up and the exact monitoring of driver and vehicle behaviour using sophisticated sensors. Mercedes-Benz is thus moving into new dimensions of driving safety. Take the example of the emergency brake: SBC already recognises the driver’s rapid movement from the accelerator onto the brake pedal as a clue to an imminent emergency stop and responds automatically: with the aid of the high-pressure reservoir, the system increases the pressure inside the brake lines and instantly presses the pads onto the brake discs so that they can get a tight grip the moment the driver steps onto the brake pedal. As a result of this so-called prefilling of the brake system, the stopping distance of an SBC-equipped sports car from a speed of 120 km/h is cut by around three per cent compared to a car featuring conventional braking technology.
Thanks to electrohydraulic back-up, the performance of Brake Assist is also improved further. If this system issues the command for an automatic emergency stop, the quick pressure build-up and the automatic prefilling of the wheel brakes leads to a shorter braking distance.
Driving stability: precise braking impulses for perfect ESP® performance

It is not just in emergency braking that Sensotronic Brake Control proves its worth, but also in other critical situations – for example, when there is a risk of swerving. Under such conditions, the system interacts with the Electronic Stability Program (ESP®) which keeps the vehicle safely on course through precise braking impulses at all wheels and/or by reducing engine speed. SBC once again offers the benefits of greater dynamics and precision: thanks to the even faster and more accurate braking impulses from the SBC high-pressure reservoir, ESP® is able to stabilise early and comfortably a vehicle which is about to break away.
This is evident, for example, from the results of the VDA lane-change test which suspension engineers use to simulate a quick obstacle-avoidance manoeuvre and to demonstrate the high capabilities of the Electronic Stability Program. In conjunction with SBC, ESP® works even more effectively and significantly reduces vehicle swerving through quick and precise braking impulses.
At the same time the driver’s steering effort is reduced. Thanks to SBC and ESP® he or she will have even less difficulty keeping the car on course.

Copyright DaimlerChrysler AG
With Sensotronic there is no need for ESP intervention when braking in a curve.
Braking in a curve. Left: conventional. Right: with SBC.
Notice the unequal braking force, smaller lateral force, better stability and alignment with SBC.
Braking in corners: greater safety thanks to variable brake force distribution
Even when braking in corners, SBC also offers more safety than a conventional brake system. This is where the variable and targeted brake force distribution is of particular advantage to actively influence the car’s compliance steer.
While conventional brake systems always mete out the brake pressure equally to the inner and outer wheels, SBC offers the possibility of assigning brake forces in a way appropriate to the situation. Hence the system will automatically increase the brake pressure at the outer wheels because the higher vertical forces also allow them to transfer greater brake forces. At the same time the brake forces at the inner wheels are reduced to provide the higher cornering forces needed to stay on course. The result is a more stable braking behaviour along with optimum deceleration values.
With the innovative Sensotronic Brake Control Mercedes engineers still stick to the proven principle of a variable brake force control for the front and rear axles. They program the system in such a way that, when slowing down from a high speed, the larger part of the brake force continues to act on the front axle. This prevents a potentially hazardous overbraking of the rear axle. Again SBC is capable of adapting to the prevailing situation. At low speeds or during partial braking, the system automatically increases the brake force share at the rear axle to improve brake system response and achieve even wear and tear of the brake pads.
Comfort: no pedal vibrations during ABS operation
Both the separation of the SBC pedal from the rest of the brake system and the proportional pressure control using mechatronics serve to increase brake comfort – particularly during sharp deceleration or when the anti-lock braking system is operational. The usual vibration of the brake pedal when ABS sets in does not occur, which, Mercedes engineers have found, is not only a comfort feature of the new system but also offers measurable safety benefits. Their research in DaimlerChrysler’s Berlin driving simulator has revealed that almost two thirds of all drivers are startled when ABS pulsation sets in: they do not increase the brake force further and are even prone to taking their foot off the brake pedal for a short while, thereby lengthening the stopping distance of their vehicle – in the driving simulator by an average of 2.10 metres - 7 feet - during ABS braking from 60 km/h - 37 MPH - on a snow-covered road surface.
SBC add-on functions: support systems to reduce driver strain
Sensotronic Brake Control offers additional advantages in everyday driving situations – when slowing down ahead of traffic lights, in the wet, in traffic jams or hill starts:
The so-called Soft-Stop function of the SBC software ensures particularly gentle and smooth stopping which provides significant comfort benefits particularly around town when you need to slow down frequently for traffic lights. All this is made possible by the higher-precision pressure control thanks to mechatronics. On a wet road surface the system metes out short brake impulses at regular intervals to ensure that the water film on the brake discs dries off and that SBC can always operate with optimum effectiveness. This automatic dry-braking function is activated at regular intervals when the car’s windscreen wipers are running. The driver does not even notice these ultra-precise brake impulses.
The Sensotronic Brake Control also incorporates a so-called Traffic Jam Assist function, which is activated using the cruise control stalk while the car is stationary. The benefit is that during stop-and-go traffic drivers only need to use the accelerator pedal; once they take their foot off the accelerator, SBC slows down the car to standstill at a steady rate of deceleration. The Traffic Jam Assist facility can remain operational up to 60 km/h - 37 MPH - and switches off automatically at higher speeds.
On hills or steep drives the Sensotronic Brake Control Drive-Away Assist prevents the car from rolling backwards or forwards – stepping onto the brake pedal quickly but sharply is all it takes to activate the brake. If the driver accelerates, the Drive-Away Assist releases the brake and allows the car to drive off smoothly.
The future: SBC paving the way for automatic guidance systems
The advent of electronics in brake technology opens up new and promising opportunities to Mercedes engineers - and not only in the disciplines of safety and comfort. Thanks to SBC they have also moved a considerable way closer to the realisation of their long-term objective, namely to be able to automatically guide the cars of the future along the roads with the aid of video cameras, proximity radar and advanced telematics. For such autonomous vehicle guidance, the experts need a computer-controlled brake system which automatically acts on the instructions of an electronic autopilot and stops the car safely.
The concept for the pressure sensor
The major requirements of a pressure sensor for X-by-Wire applications, as previously mentioned, are high precision and reliability as well as multi functionality and flexibility, features strongly desired in modern sensor design. These requirements have heavily influenced the design choices. In order to enhance the precision it has been conceived a silicon micro machined piezo-resistive pressure sensor chip with two different sensitivities: a higher one in a low-pressure range (0 to 30 bar), where often an elevated resolution is required, and a lower one at higher pressures (up to 250 bar). Thus, with one single membrane chip, practically two sensors are obtained. Moreover, as it will be explained further on more in details, the transition between the two sensitivity levels determines an area with particularly interesting characteristics that could be used to recalibrate the sensor from offsets without having to remove it from the system where it normally operates and mount it on a reference bench. Somehow what could be called a “self-recalibration” ability. Enhancing the reliability and the therefore the availability of a sensor needs stability in the components and sensor health monitoring strategies. This latter is possible through an integrated digital electronic that would hence allow self-test functions. Key point of these procedures is the previously mentioned recalibration area, which potentially allows monitoring offsets with a precision up to 0.15 % full scale (FS) without need on integrated actuators and the relative control electronic. A digital electronic can also be designed, without major difficulties, to integrate a controller for networking (Controlled Area Network, for example), consequently enhancing the capabilities and the flexibility of the sensor.
2.1 Two levels sensitivity and recalibration
The transduction of the physical quantity, pressure in the specific case, into an electrically measurable figure is performed though piezo-resistive elements implanted on the surface of the of the silicon chip. This type of transducers is sensitive to the stresses in the two coordinates defined with respect to the plane where the elements are implanted in the chip (8). The stresses on the piezo-resistors induce changes in their resistance that can be detected with rather high accuracy as unbalance of a Wheaston bridge. The stresses on the chip surface depend on the geometrical characteristics of the latter and on the forces deriving from the applied pressure (9). Therefore transducers are usually placed in such a way to have maximum response to the pressure changes and in order to obtain a constant sensitivity. Normally small variations in the sensitivity are undesirable as they complicate the calibration process and often reduce the sensor accuracy. On the contrary, in the presented design, a drastical change in the sensitivity as been conceived through a major variation of the sensor geometry. This characteristic has been exploited to realize the two sensitivity ranges.

The sensor consists of a membrane structure at which centre is placed a cylindrical structure (a centreboss membrane) as shown in fig. 1. As the pressure is applied, from top, the membrane will move freely downward: this determines a rather sensitive sensor response, which will continue until 30 bar is reached. At this point the cylinder will enter into contact with the silicon bulk plate. Consequently the geometrical structure of the sensor will almost instantly change: the membrane will not be able to move freely any more and will behave more like a ring fixed at the two sides. The stiffness of the structure will significantly increase, thus the building up of stresses due to pressure will reduce and thereby the sensitivity will be roughly of a four factor smaller than the one between 0 and 30 bar. This determines the low sensitivity range that is specified up to 250bar. Fig. 2 summarises graphically what has been here above described.
Moreover the cylindrical central structure makes the membrane fairly robust and resistant to overpressures.
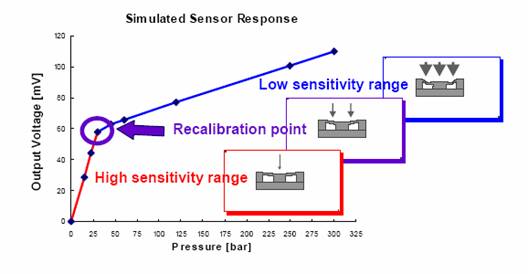
In silicon the elastic behaviour, opposed to the plastic one, is dominant. Therefore silicon withstands stresses with almost unchanged characteristics: this is what makes it a good material for sensors. Thus it can be expected that in the described design the cylindrical central structure and the respective contact area on the silicon bulk will remain stable. Consequently it can also be expected that the pressure needed to generate the contact between the two parts will remain constant through the sensor lifetime, thereby the transition between the two sensitivity levels will take place always at the same pressure: in fig. 2 this is defined as Recalibration point.
Now, gathering this information together, a contact point is obtained, which is: mechanically determined, constant and independent from the electrical characteristics of the transducers. Therefore, if it is possible to evaluate a procedure to determine this point though the normal sensor operation, than a monitoring and correction of electrical instabilities such as offset drifts can be achieved without need of a reference sensor or external action: a simple example of how this could be obtained will be given in the paragraph 2.2. Moreover, the recalibration principle makes no use of internal actuation system, no actuator control or extra technology is therefore needed: the sensor integrates what can be called a passive recalibration and self-test principle. Furthermore such procedure could enable to avoid long and costly temperature calibrations. Least but not last, the contact or recalibration point is determined through the sensor technology and can be so defined to be different from sensor to sensor. In the case the sensor is operating in a network environment where more of these sensors with different contact pressures are present, it is possible to obtain more recalibration points, potentially increasing the sensor accuracy.
2.2 The integrated digital electronic and the self-test
Digital electronic is often thought to be expensive for pressure sensors. This argument usually does not consider all the potential advantages that it can bring, either because of the difficulty to have a complete overview on them or as a rather significant research effort is needed to be able to exploit them completely. Moreover costs of digital electronic are on the long term continuously decreasing.
In the presented design it has been chosen to make use of a digital electronic in order to implement monitoring and correction strategies in the sensor. Activities are being carried out to investigate all possible failures of the sensor and evaluate their entity, this already at design level. Hence eliminate through design as much of them as possible, particularly those that cannot be automatically detected by the sensor. On the remainder will be in the first place evaluated methods to individuate the errors (self-test) and, when possible, correct them without the outside intervention (recalibration). A diagram of this procedure is described in fig. 3.

Furthermore network capabilities can be introduced and thereby user tailored functions can be programmed resulting in an enhanced sensor flexibility.
Clearly a complex electronic has not only advantages consideration has to be taken not to introduce further hardware, but also software errors. Central point of the self-test strategies is the previously described “Recalibration point”. The presence of a digital electronic allows performing the drift monitoring and the recalibration internally. A simple example might help the understanding. Lets suppose that the sensor is working in a system where the pressure can rise linearly, namely 250 bar in 8 sec., for simplicity lets also suppose that the sensor has an ideal linear behaviour in the 2 sensitivity ranges (in the real case there will be a linearity error which will ad up to the calculations, on the other hand though the sensor response could be better described by polynomialls of higher order, therefore it has been chosen to stay with the simplest case). During the pressure rise 4 points are sampled through the digital electronic: point one at sensor output around 0 V and the second around 2 V, in the low pressure range, the third at 2.3 V and the fourth at 4 V, in the high pressure one as shown in fig. 4 (a wise choice of the points can influence up to 50% the accuracy with which the recalibration point can be determined). These points are used to define the 2 lines, which intersection will determine the contact voltage. This can be compared with the value stored in the sensor memory at the previous recalibration and, if the difference exceeds the calculation errors, the new value will substitute the old one: the sensor response lines will be adjusted and thereby a recalibration will take place. Key point of this procedure is the dimension of the calculation errors. If the linearity error is not considered, for the reasons previously given, these depend on the sensor A/D converter resolution and the sampling frequency. Therefore, with a 10 bit A/D converter and sampling at 1 kHz a recalibration with approximately a 0.15 % accuracy FS can be obtained. To the reader is left the little mathematic game that takes to the given value.

The sensor design
Defining a concept for a new sensor is no trivial job. Putting this into a realisable design is even more complex and requires a good deal of experience in sensor manufacturing and simulation techniques. The transducer chip design has been conceived in collaboration between EADS (European Aerospace
Defence and Space company) Deutschland GmbH and AKTIV SENSOR GmbH, with the contribution of the Technical University of Berlin. The electronic design instead was the result of the cooperation of EADS Deutschland GmbH and ELBAU GmbH.
3.1 The chip design
The major difficulty in the design was to realise the change in the mechanical structure in such a way that the sensor response variation between the two configurations would be possibly sharp, but most of all that the response with respect to the pressure change would be monotonous. If this condition is not fulfilled, there is no one to one correspondence between the transducer response and the applied pressure: there will be different pressures that will produce the same output signal, thereby the sensor will be intrinsically unreliable and therefore unusable. Overcoming this problem means that the piezoresistors (the transducing elements) have to see always increasing stresses with the rising of the pressure. Therefore the choice on the piezo-resistor position on the chip membrane is determinant and with it the results of the simulation. The choice that has been made in the positioning of the piezo-resistive elements can be noted that the stress distribution changes significantly before and after the mechanical contact. Moreover it has been chosen design 90-degree profiles in order to reduce the previously described risk: this implies using anisotropy etching. etching. The results of the dry etching process can be seen in fig. 6.

3.2 The electronic design
The design of the electronic should be maintained to a low level of complexity. Never the less attention should be given to the design in order to be able to implement all the self-test and recalibration features allowed by the design, but at the same time avoiding unnecessary over dimensioning of components that would only reflect itself on an increase of costs. Particular care should be given in taking advantage of the high resolution in the low-pressure range: for example, in the case of a linear analogue or Pulse-Width Modulation (PWM) output is desired, as it normally is in sensor output coding, a high resolution digital to analogue converter is needed. Moreover, in the design is planned: a volatile memory for storing the calibration parameters, a non-volatile one for the programming of the self-test and recalibration algorithms, a PWM module, a CAN module for a bus communication and of course analogue to digital converter to enable the signal processing. In the first prototype a low level of integration has been chosen to enable more design flexibility, never the less most of the needed functions could be performed by a commercially available ASIC which could be integrated in second stage.
REFERENCES
http://www.autospeed.com.au/
http://www.whnet.com/4x4/index.html
http://www.mercedes-benz.com/e/default.htm
http://www.howstuffworks.com
Overdrive Vol. 3., No. 5, January 2001










